Proses packaging atau pengemasan adalah salah satu tahap yang vital pada industri manufaktur, contohkan industri makanan. Selain alasan produktifitas dan pertimbangan cost jangka panjang, dalam penerapannya proses ini dijaga agar steril dengan seminimal mungkin melibatkan campur tangan manusia. Oleh karena itu, sistem otomasi menggunakan robot menjadi pilihan solusi proses packaging.
Palletizer adalah salah satu bentuk Otomatisasi Proses Packaging mengunakan Robot, contohnya robot tipe Gantry. Robot Gantry adalah robot 3 axis yang memiliki area kerja berupa ruang Cartesian (X,Y,Z) dimana robot jenis ini sangat tepat digunakan sebagai pilihan otomasi proses Pick and Place. Berbeda dengan tipe robot lengan (arm), setiap axis saling tegak lurus satu sama lain dan bergerak linear, yang secara fungsi dan perencanaan pergerakan akan jauh lebih mudah. Kelebihan robot Gantry dibanding dengan robot lain adalah cakupan area kerja yang luas.
Gambar di bawah adalah contoh palletizer dengan menggunakan robot gantry. Karena bentuknya yang linear, robot gantry secara fleksibel dapat diletakkan di atas konstruksi utama sistem palletizer tanpa tambahan ruang.

<<Gambar 1 sistem palletizer dengan robot gantry>> sumber gambar : omron.eu
Penjelasan dari setiap nomor pada bagian sistem palletizer tersebut adalah sebagai berikut:
- Roller in-feed
Roller in-feed berperan sebagai jalur masuk benda kerja yang akan disusun, misalnya karton atau box lain. Dengan roller in-feed, pengaturan masuk benda kerja masih dilakukan secara manual. Namun bila diganti dengan konveyor berpenggerak motor maka dapat diatur
- Sistem penggerak bidang XY
Axis X dan Y robot berperan sebagai pengatur posisi benda pada palet. Masing – masing memiliki penggerak motor yang diubah gerakan putarannya menjadi perpindahan linear dengan menggunakan ballscrew atau belt. Pilihan motor harus disesuaikan dengan tingkat kepresisian pengaturan benda, contohnya motor servo yang memiliki pengaturan posisi dan kecepatan yang baik.
- Penggerak bidang Z
Axis Z berperan sebagai pengatur ketinggian susunan benda kerja. Seperti halnya pada sumbu X dan Y, sumbu Z juga dapat dikendalikan dengan motor motor servo.
- Gripper
Pemilihan gripper sangat tergantung dari bentuk dan karakteristik benda kerja yang akan dipegang. Jika yang dibutuhkan adalah gripper tipe rotary, maka motor servo dapat digunakan. Namun jika diperlukan tipe clamping, gripper dapat dibuat dengan aktuator pneumatik dengan tenaga angin.
- Roller Out-feed
Roller Out-feed adalah jalur keluarnya benda kerja yang telah disusun pada palet. Pada jalur masuk benda kerja (in-feed) dan jalur keluar (out-feed) sebaiknya ditambahkan sensor yang berfungsi sebagai pengaman seperti safety light curtain.
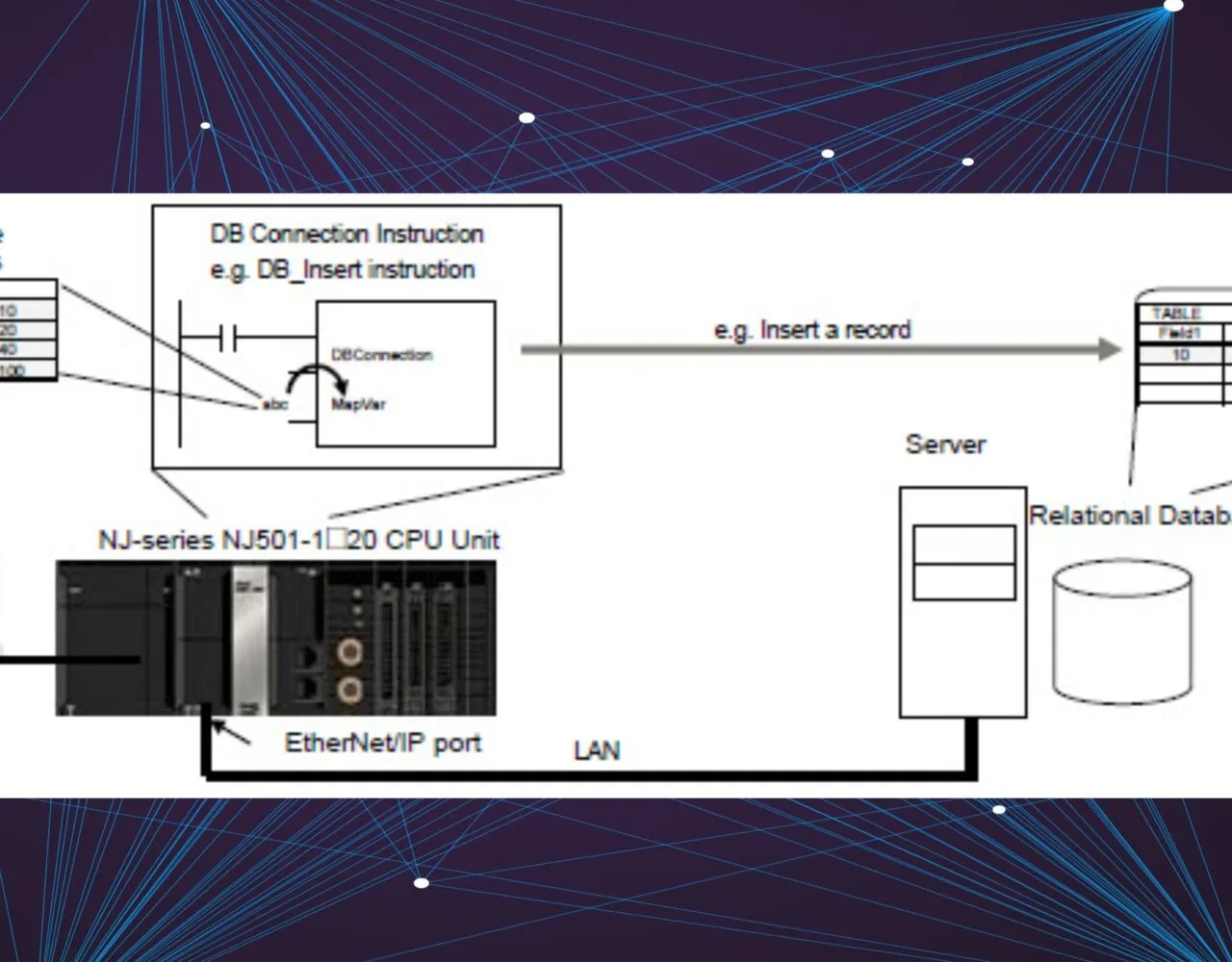
Omron sebagai perusahaan otomasi industri memiliki komponen – komponen yang mendukung pengembangan teknologi sistem palletizer dengan robot gantry tersebut di atas. Gambar di bawah adalah pilihan komponen yang diperlukan.

<<Gambar 2 Komponen pendukung>> sumber gambar : omron.eu
Pengendali mesin NJ series adalah alternatif utama untuk sistem otomasi dengan mengandalkan pergerakan servo. Kelompok komponen dengan tanda C adalah motor servo dan driver yang mengendalikan pergerakan axis X, Y dan Z. Robot gantry H-bot Omron memiliki motor dan frame yang rigid sehingga pergerakan lengan robot lebih ringan. Sedangkan kelompok B adalah driver servo otor yang dapat digunakan untuk semua jenis motor servo. Kerja engineer akan jauh lenih mudah dan cepat dengan adanya Function Block untuk pergerakan H-bot yang telah disediakan pada fitur kendali mesin NJ series.
Kelompok A adalah HMI (Human Machine Interface) sebagai sarana untuk memudahkan operator dalam memonitor kerja sistem palletizer. Komponen utama sebagai komunikasi adalah etherCAT yang menghubungkan komponen – komponen kendali kepada NJ Series.
Demikian pembahasan tentang salah satu penerapan sistem otomatisasi pada sistem packaging palletizer dengan menggunakan robot gantry.
Artikel ini ditulis oleh Eka Samsul Maarif
Penulis adalah blogger tentang Otomasi Industri